一种勘察无人机的制作方法-k8凯发
1.本实用新型属于无人机技术领域,具体地说,涉及一种勘察无人机。
背景技术:
2.对于因林木较少而导致沙尘较多的地区,以及排放含尘废弃的区域,需要通过勘察测绘,为造林补绿、生态修复等规划设计提供参考。
目前,很多的现场勘察通常使用无人机代替人为勘察,以降低人员行走勘察的劳动强度,且通过无人机进行勘察不仅方便,还能快速移动,以短时间内获得更多的信息。
3.在一些环境中,空气中会具有较多的可阻碍视野的尘粒(例如,烟尘排放源附近的空气中含有烟尘微粒,或干燥空气中具有扬起的尘土微粒),无人机在进行勘察过程摄像头表面会沾染尘粒,导致视野模糊,不利于观察拍摄,而将其返回擦拭容易浪费时间和无人机的电量。
4.有鉴于此特提出本实用新型。
技术实现要素:
5.为解决摄像头表面沾染尘粒导致视野模糊,不利于观察拍摄的问题,本实用新型采用技术方案的基本构思是:
6.一种勘察无人机,包括无人机和安装在无人机底部的摄像头,所述无人机底部设置有防护罩,所述摄像头位于防护罩内部,所述防护罩外侧设置有清洁机构,所述清洁机构包括清洁刷,所述清洁刷的截面形状呈圆弧形,所述防护罩的形状为半球形,所述清洁刷的内壁贴靠防护罩的外表面;
7.所述无人机一侧设置有喷水机构,所述喷水机构包括第一导管,所述第一导管的一侧安装在无人机的一侧,所述第一导管内部设置有螺旋桨叶,所述第一导管的顶部密封连接有第二导管,且第二导管的另一端密封连接有水箱,所述水箱的底部安装在无人机的顶部;
8.所述无人机上还设置有第一驱动机构和第二驱动机构,所述第一驱动机构用于驱动清洁刷转动,第二驱动机构用于驱动螺旋桨叶转动。
9.根据所述的一种勘察无人机,所述防护罩的顶部安装有齿环,且齿环的顶部转动连接在无人机的底部。
10.根据所述的一种勘察无人机,所述第一驱动机构包括电动推杆,所述清洁刷的两端均转动连接有固定块,且固定块的顶部安装在无人机的底部,所述清洁刷的其中一端同转轴安装有第一齿轮,且第一齿轮的一侧啮合连接有齿条,所述齿条的一端安装有电动推杆,且电动推杆的顶部安装在无人机的底部。
11.根据所述的一种勘察无人机,所述第二驱动机构包括电机,所述齿条一侧远离电动推杆一端安装有第二电极,所述无人机底部安装有第一电极,且第一电极的横向位置与固定块对齐,所述第一电极通过导线与电源电性连接,所述第二电极通过导线电性连接有
电机,且电机的一侧安装在无人机的一侧。
12.根据所述的一种勘察无人机,所述第二驱动机构还包括第二齿轮和第三齿轮,所述电机的底部安装有第二齿轮,且第二齿轮的一侧啮合连接有第三齿轮,所述第三齿轮的两端开设有圆孔,所述无人机底部位于第三齿轮一侧安装有雾化喷头,且雾化喷头的顶端朝向防护罩,所述雾化喷头的末端转动密封连接在第三齿轮的上圆孔底部。
13.根据所述的一种勘察无人机,所述第三齿轮的圆孔内部安装有第二支架,所述螺旋桨叶的底部安装在第二支架的顶部,所述螺旋桨叶的顶部转动连接有第一支架,且第一支架的两端安装在第一导管的内壁。
14.本实用新型与现有技术相比具有以下有益效果:
15.本实用新型通过设置防护罩来避免摄像头表面沾染尘粒导致视野模糊,且在防护罩表面沾染尘粒时,第一驱动机构驱动清洁刷转动,从而使清洁刷对防护罩进行清洁,第二驱动机构驱动螺旋桨叶转动,通过螺旋桨叶将水箱内的水输送喷出至防护罩的外表面,增加清洁刷对防护罩的清洗效果,如此,可确保无人机能够进行清晰地观察拍摄;
16.通过设置的齿环和第二驱动结构,第二驱动机构可通过齿环驱动防护罩进行转动,以提高防护罩外表面与清洁刷之间的相对移动速度,使得对防护罩的清洗效果更佳。
17.下面结合附图对本实用新型的具体实施方式作进一步详细的描述。
附图说明
18.在附图中:
19.图1为本实用新型底部结构示意图;
20.图2为本实用新型顶部结构示意图;
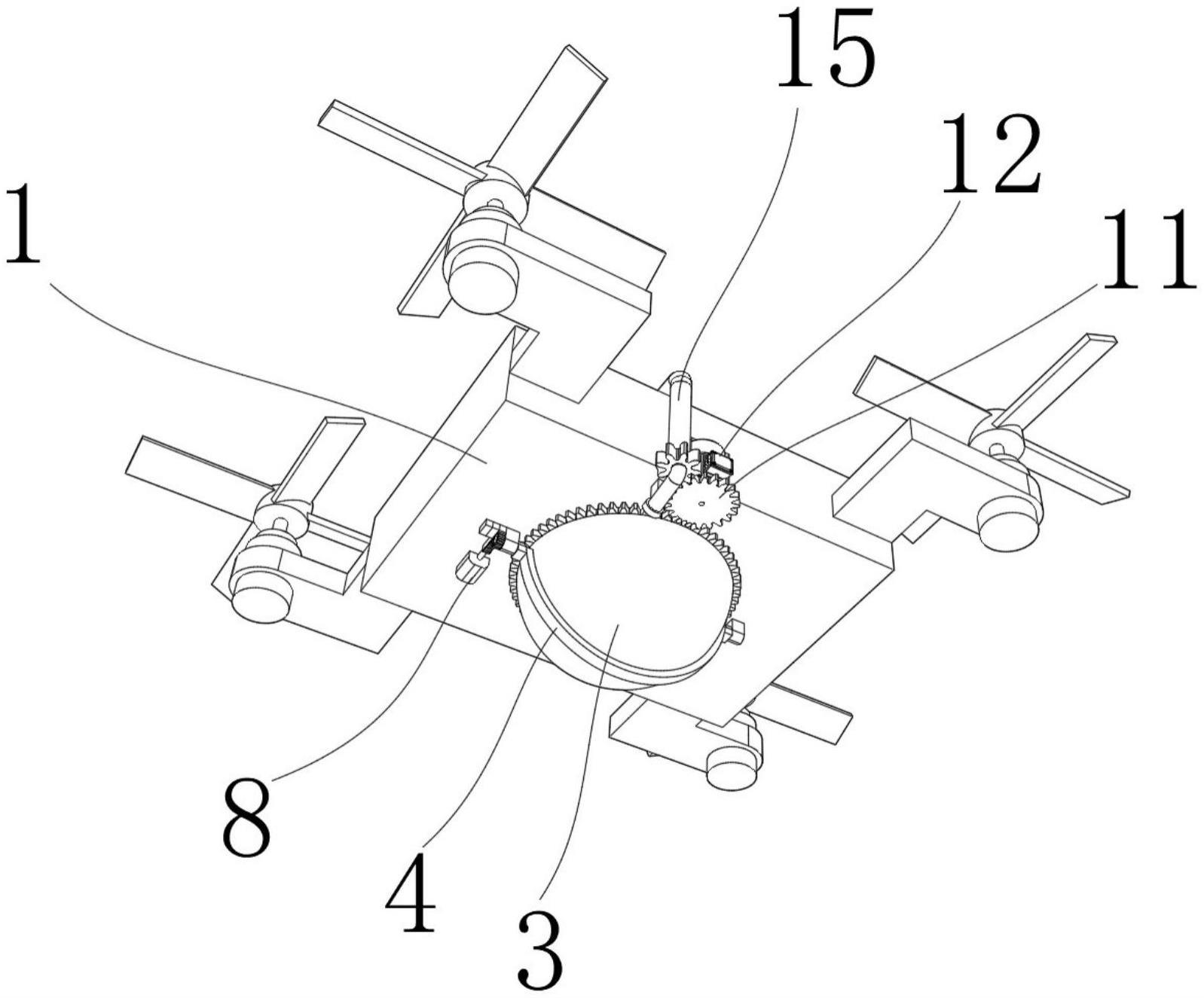
21.图3为本实用新型无人机底部结构示意图;
22.图4为本实用新型图3中a处结构示意图;
23.图5为本实用新型第一导管内部结构示意图。
24.图中:
1、无人机;
2、摄像头;
3、防护罩;
4、齿环;
5、清洁刷;
6、第一齿轮;
7、齿条;
8、电动推杆;
9、第一电极;
10、第二电极;
11、第二齿轮;
12、电机;
13、第三齿轮;
14、雾化喷头;
15、第一导管;
16、第一支架;
17、螺旋桨叶;
18、第二支架;
19、第二导管;
20、水箱;
21、固定块。
具体实施方式
25.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对实施例中的技术方案进行清楚、完整地描述,以下实施例用于说明本实用新型。
26.如图1至图5所示,一种勘察无人机,包括无人机1和安装在无人机1底部的摄像头2,其特征在于,无人机1底部设置有防护罩3,摄像头2位于防护罩3内部,防护罩3外侧设置有清洁机构,清洁机构包括清洁刷5,清洁刷5的截面形状呈圆弧形,所述防护罩的形状为半球形,所述清洁刷的内壁贴靠防护罩的外表面;无人机1一侧设置有喷水机构,喷水机构包括第一导管
15,第一导管
15的一侧安装在无人机1的一侧,第一导管
15内部设置有螺旋桨叶
17,第一导管
15的顶部密封连接有第二导管
19,且第二导管
19的另一端密封连接有水箱
20,
水箱
20
的底部安装在无人机1的顶部;无人机1上还设置有第一驱动机构和第二驱动机构,第一驱动机构用于驱动清洁刷5转动,第二驱动机构用于驱动螺旋桨叶
17转动。
27.如图1至图5所示,在具体实施方式中,第一驱动机构包括电动推杆8,防护罩3的顶部安装有齿环4,且齿环4的顶部转动连接在无人机1的底部,清洁刷5的两端均转动连接有固定块
21,且固定块
21的顶部安装在无人机1的底部,清洁刷5的其中一端同转轴安装有第一齿轮6,且第一齿轮6的一侧啮合连接有齿条7,齿条7的一端安装有电动推杆8,且电动推杆8的顶部安装在无人机1的底部。
本设置中,电动推杆8,电动推杆8推动齿条7移动,齿条7通过与第一齿轮6的啮合带动清洁刷5转动,从而使其转至竖直位置。
28.如图1至图5所示,第二驱动机构包括电机
12、第二齿轮
11和第三齿轮
13,齿条7一侧远离电动推杆8一端安装有第二电极
10,无人机1底部安装有第一电极9,且第一电极9的横向位置与固定块
21对齐,第一电极9通过导线与电源电性连接,第二电极
10通过导线电性连接有电机
12,且电机
12的一侧安装在无人机1的一侧。
本设置中,齿条7带动第二电极
10移动并使其与第一电极9接触,此时电机
12与电源连通。
29.进一步的,电机
12的底部安装有第二齿轮
11,且第二齿轮
11的一侧啮合连接有第三齿轮
13,第三齿轮
13的两端开设有圆孔,无人机1底部位于第三齿轮
13一侧安装有雾化喷头
14,且雾化喷头
14的顶端朝向防护罩3,雾化喷头
14的末端转动密封连接在第三齿轮
13的上圆孔底部。
本设置中,电机
12转动带动第二齿轮
11转动,第二齿轮
11通过啮合带动齿环4转动,齿环4带动防护罩3转动,从而使其与清洁刷5发生相对滑动。
30.如图1至图5所示,进一步的,第三齿轮
13的圆孔内部安装有第二支架
18,螺旋桨叶
17的底部安装在第二支架
18的顶部,螺旋桨叶
17的顶部转动连接有第一支架
16,且第一支架
16的两端安装在第一导管
15的内壁。
本设置中,第二齿轮
11通过啮合还带动第三齿轮
13转动,第三齿轮
13带动螺旋桨叶
17转动,同时水箱
20
内的水通过第二导管
19流进第一导管
15,通过螺旋桨叶
17产生的压力带动水流通过雾化喷头
14喷出,并对防护罩表面形成水雾,增加清洁刷5对防护罩3的清洁效果。
31.本实施例的一种勘察无人机的实施原理如下:
32.无人机1进行正常工作时,通过摄像头2对周围环境进行勘察,同时防护罩3能够有效避免尘粒污染摄像头2造成视野模糊的情况;
33.当防护罩3需要进行清理时,启动电动推杆8,电动推杆8推动齿条7移动,齿条7通过与第一齿轮6的啮合带动清洁刷5转动,从而使其转至竖直位置,同时齿条7带动第二电极
10移动并使其与第一电极9接触,此时电机
12与电源连通,电机
12转动带动第二齿轮
11转动,第二齿轮
11通过啮合带动齿环4转动,齿环4带动防护罩3转动,从而使其与清洁刷5发生相对滑动,使得清洁刷5能够对防护罩3进行清洁,第二齿轮
11通过啮合还带动第三齿轮
13转动,第三齿轮
13带动螺旋桨叶
17转动,同时水箱
20
内的水通过第二导管
19流进第一导管
15,通过螺旋桨叶
17产生的压力带动水流通过雾化喷头
14喷出,并对防护罩表面形成水雾,增加清洁刷5对防护罩3的清洁效果。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!