航道清污设备的制作方法-k8凯发
1.本实用新型涉及清污领域,更具体的说是航道清污设备。
背景技术:
2.航道整治是用整治建筑物调整和控制水流,稳定有利河势,以改善航道航行条件的工程措施,广义的航道整治也包括炸礁、疏浚和裁弯取直等。
航道整治的主要任务是:稳定航槽;刷深浅滩,增加航道水深,拓宽航道宽度,增大弯曲半径;降低急流滩的流速;改善险滩的流态;而航道中使用污泥清理装置就能有效的增加航道水深,而现有技术清理航道时,不能够对航道上的脏污冲击破碎后铲起实现航道的脏污清洁。
技术实现要素:
3.为克服现有技术的不足,本实用新型提供航道清污设备,能够对航道上的脏污冲击破碎后铲起实现航道的脏污清洁。
4.本实用新型解决其技术问题所采用的技术方案是:
5.航道清污设备,包括安装在行走车上的框架上,框架上滑动连接有两个竖轴,两个竖轴的下端固接有加工有多个间隔槽的破碎架,破碎架上固接有齿条ⅰ,框架上转动连接有转轴,转轴的中部固接有周期性驱动齿条ⅰ滑动的齿轮ⅰ。
6.进一步的,所述齿轮ⅰ为缺齿齿轮。
7.进一步的,所述齿条ⅰ与框架面接触。
8.进一步的,所述两个竖轴的上端均固接有顶板,两个顶板均与框架间固接有多个弹簧。
9.进一步的,所述框架上滑动连接有两个齿条ⅱ,两个齿条ⅱ均固接在铲板上。
附图说明
10.下面结合附图和具体实施方法对本实用新型做进一步详细的说明。
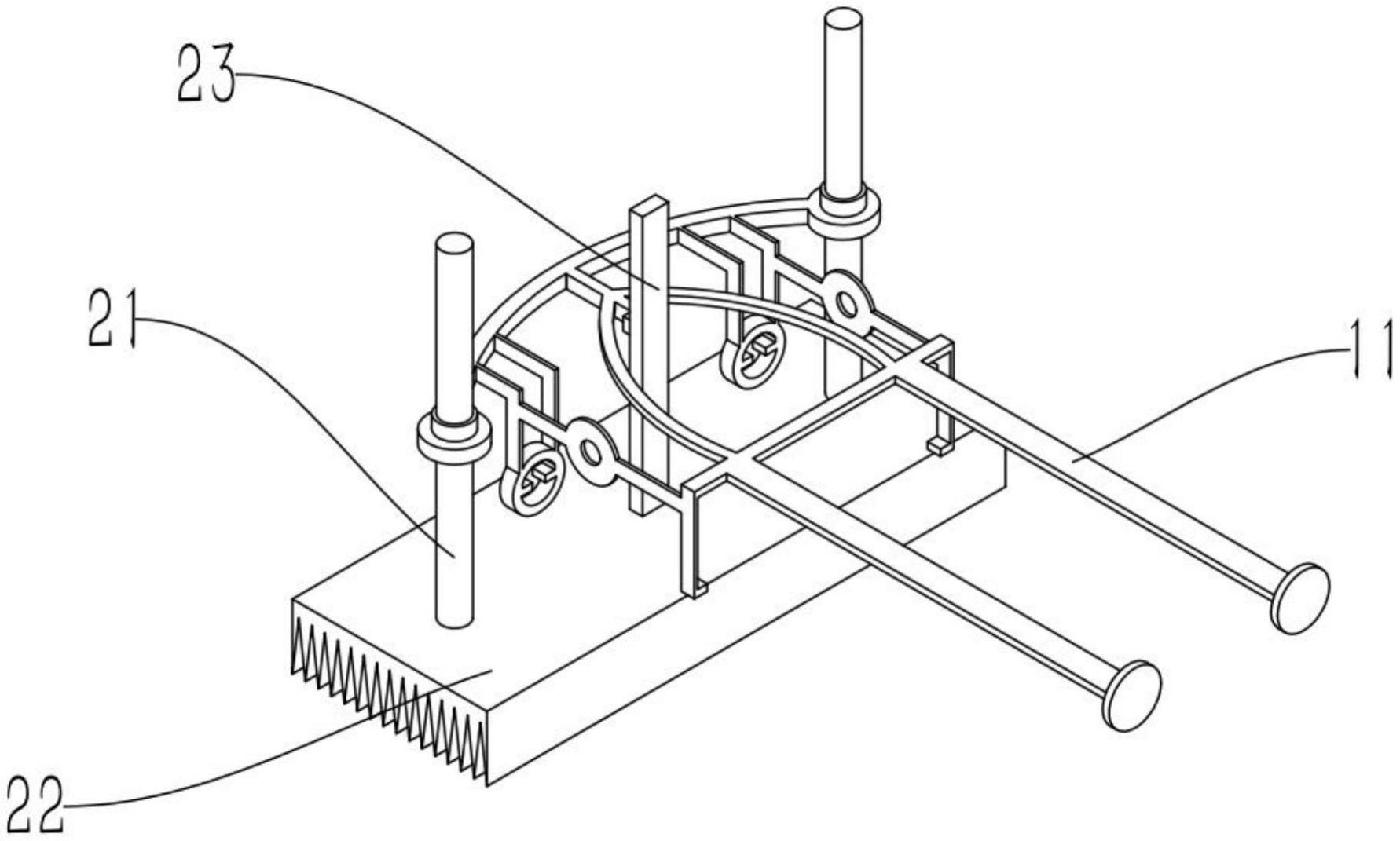
11.图1为破碎脏污的结构图;
12.图2为破碎架往复的结构图;
13.图3为铲板的安装结构图;
14.图4为图3所示结构另一方向的结构图;
15.图5为驱动铲板滑动的结构图;
16.图6为减速电机的安装结构图;
17.图7为航道清污设备的结构图。
具体实施方式
18.参考图1和2,详细说明竖直铲动脏污的实施过程:
19.航道清污设备,包括安装在行走车上的框架
11上,行走车为惯用的行走机构,能够
通过行走车的移动带动框架
11进行移动,框架
11上滑动连接有两个竖轴
21,两个竖轴
21能够在自身轴线上进行线性滑动,两个竖轴
21的下端固定连接有加工有多个间隔槽的破碎架
22,当两个竖轴
21在自身轴线上进行线性滑动时带动破碎架
22在竖直方向上进行滑动,从而能够通过破碎架
22的往复滑动,利用自身的间隔槽加工出的尖刃对脏污进行破碎,便于对脏污的清除,破碎架
22上固定连接有齿条ⅰ23,框架
11上转动连接有转轴
41,转轴
41的中部固定连接有周期性驱动齿条ⅰ23滑动的齿轮ⅰ42,当齿轮ⅰ42转动时,齿轮ⅰ42啮合驱动齿条ⅰ23滑动,齿条ⅰ23滑动带动破碎架
22升降,从而实现对脏污的破碎。
20.结合上述实施例,还可以实现以下功能;
21.参考图2,详细说明周期性驱动齿条ⅰ上升的实施过程:
22.所述齿轮ⅰ42为缺齿齿轮,从而通过齿轮ⅰ42的有效齿数转动下驱动齿条ⅰ23上升,当齿轮ⅰ42的缺齿位置转动到齿条ⅰ23的位置时,齿条ⅰ23进行复位,等待齿轮ⅰ42的有效齿数下一次转动到驱动齿条ⅰ23上升,从而实现齿轮ⅰ42对齿条ⅰ23的周期性驱动。
23.结合上述实施例,还可以实现以下功能;
24.参考图1,详细说明确保齿条ⅰ稳定滑动的实施过程:
25.所述齿条ⅰ23与框架
11面接触,从而确保齿轮ⅰ42驱动齿条ⅰ23时,齿条ⅰ23不会因为长期使用后的磨损导致齿轮ⅰ42驱动齿条ⅰ23出现偏离。
26.结合上述实施例,还可以实现以下功能;
27.参考图2,详细说明驱动破碎架进行复位的实施过程:
28.所述两个竖轴
21的上端均固地你个连接有顶板
31,两个顶板
31均与框架
11间固定连接有多个弹簧
32,当齿轮ⅰ42驱动齿条ⅰ23时,压缩多个弹簧
32进行蓄力,当齿轮ⅰ42失去对齿条ⅰ23的啮合时,受力压缩的多个弹簧
32推动破碎架
22快速下降,在惯性的作用下越过破碎架
22的初始位置,从而实现对脏污的破碎。
29.结合上述实施例,还可以实现以下功能;
30.参考图3和4,详细说明铲起破碎的脏污的实施过程:
31.所述框架
11上滑动连接有两个齿条ⅱ51,两个齿条ⅱ51均固定连接在铲板
52上,当驱动两个齿条ⅱ51滑动时,两个齿条ⅱ51带动铲板
52滑动,从而将经过破碎架
22破碎的脏污铲起,实现航道上脏污的清洁。
32.结合上述实施例,还可以实现以下功能;
33.参考图5和7,详细说明驱动两个齿条ⅱ滑动的实施过程:
34.所述转轴
41上固定连接有两个同步驱动两个齿条ⅱ51滑动的边轮
61,当转轴
41转动时,转轴
41带动两个边轮
61转动,两个边轮
61同步转动啮合驱动两个齿条ⅱ51滑动,两个齿条ⅱ51带动铲板
52进行滑动,从而实现航道上脏污的清洁。
35.结合上述实施例,还可以实现以下功能;
36.参考图5,详细说明周期性驱动两个齿条ⅱ滑动的实施过程:
37.两个所述边轮
61均为缺齿齿轮,从而通过两个边轮
61的有效齿啮合驱动两个齿条ⅱ51滑动,当两个边轮
61的有效齿失去与对应的齿条ⅱ51啮合传动时,两个齿条ⅱ51带动铲板
52进行复位,从而通过两个边轮
61的有效齿周期性驱动齿条ⅱ51滑动,从而实现铲板
52的往复滑动,实现对航道的脏污的清洁。
38.结合上述实施例,还可以实现以下功能;
39.参考图4和7,详细说明两个齿条ⅱ复位的实施过程:
40.所述两个齿条ⅱ51的端部均与框架
11间固定连接有多个拉簧
53,从而在两个边轮
61啮合驱动两个齿条ⅱ51滑动时拉动多个拉簧
53进行拉伸,当两个边轮
61的有效齿失去与对应的齿条ⅱ51啮合传动时,拉伸的多个拉簧
53带动两个齿条ⅱ51进行复位,从而实现两个边轮
61啮合驱动两个齿条ⅱ51往复性滑动。
41.结合上述实施例,还可以实现以下功能;
42.参考图6,详细说明驱动转轴转动的实施过程:
43.所述框架
11上固定连接有减速电机
71,减速电机
71的输出轴与转轴
41固定连接,启动减速电机
71,减速电机
71的输出轴带动转轴
41转动,从而实现对破碎架
22和铲板
52的驱动。
44.结合上述实施例,还可以实现以下功能;
45.参考图5,详细说明驱动两个齿条ⅱ同步滑动的实施过程:
46.两个所述边轮
61的缺齿在轴线方向重合,从而实现两个边轮
61同步周期性啮合驱动两个齿条ⅱ51滑动。
当前第1页1
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!