位置确定方法、装置、计算机、可读存储介质及程序产品与流程-k8凯发
本技术涉及计算机,尤其涉及一种位置确定方法、装置、计算机、可读存储介质及程序产品。
背景技术:
1、目前,在虚拟现实(virtual reality,vr)场景中,是通过vr手柄进行vr应用,因此需要对vr手柄的位置进行确定。一般情况下,是在vr手柄中使用定位环,计算出vr手柄相对于vr头显的位置,具体的,是通过vr头显拍摄照片,形成vr手柄的特征点的二维(2dimension,2d)位置,通过定位环的设计,将2d与3d模型进行匹配,使用传统几何中的透视n点(perspective-n-point,pnp)算法,计算出vr手柄相对于vr头显的位置。目前,并未存在对佩戴式设备的位置确定方式,而定位环较大,佩戴式设备较小,也就是佩戴式设备中未集成定位环,这也就使得对于vr手柄的位置确定方式,无法应用于佩戴式设备的位置确定中,也就是,无法实现对佩戴式设备的位置确定。
技术实现思路
1、本技术实施例提供了一种位置确定方法、装置、计算机、可读存储介质及程序产品,可以实现对佩戴式设备的位置确定,提高位置确定的准确性。
2、本技术实施例一方面提供了一种位置确定方法,该方法包括:
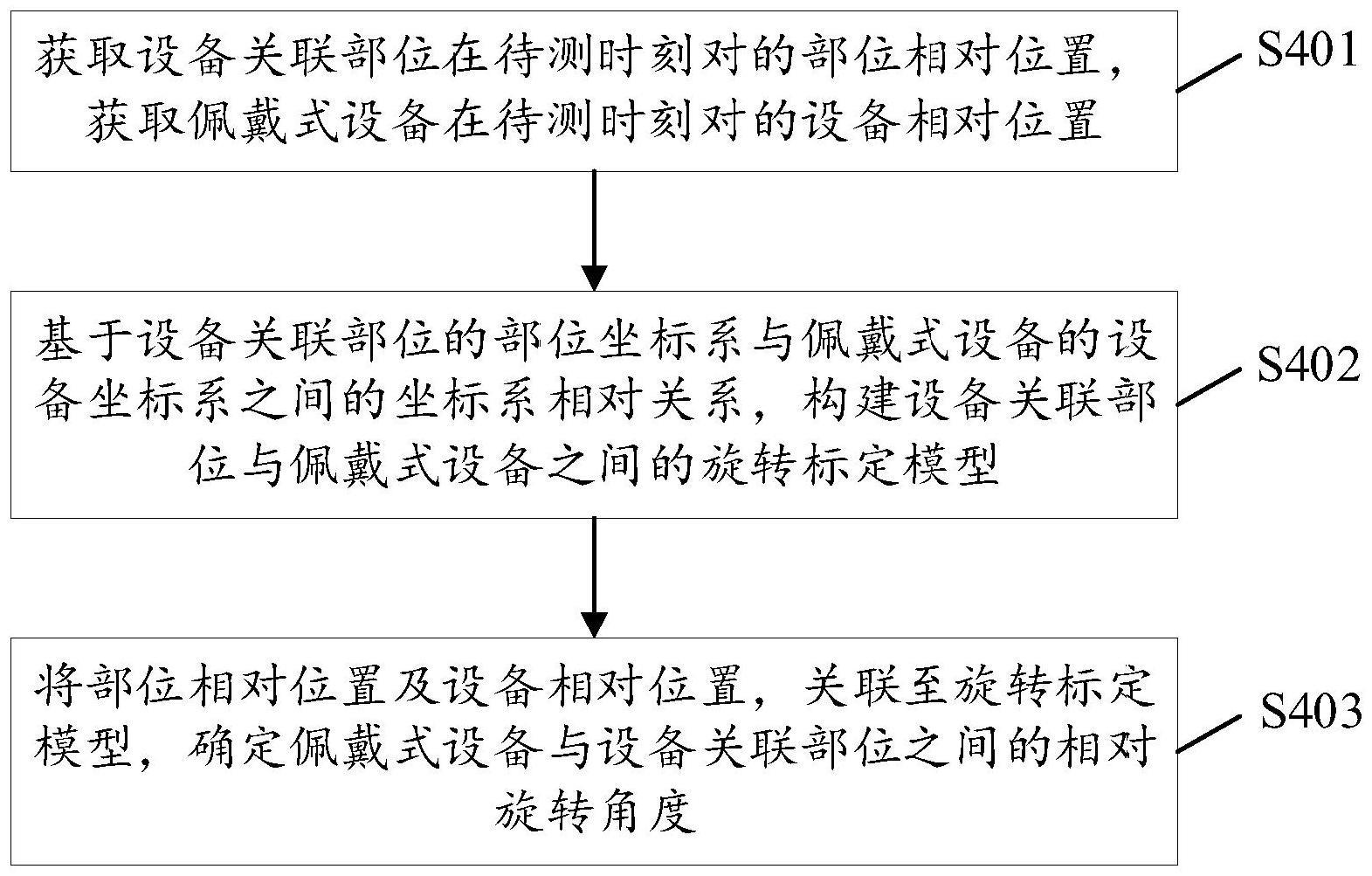
3、获取设备关联部位在待测时刻对的部位相对位置,获取佩戴式设备在待测时刻对的设备相对位置;设备关联部位是指佩戴该佩戴式设备的部位;
4、基于设备关联部位的部位坐标系与佩戴式设备的设备坐标系之间的坐标系相对关系,构建设备关联部位与佩戴式设备之间的旋转标定模型;
5、将部位相对位置及设备相对位置,关联至旋转标定模型,确定佩戴式设备与设备关联部位之间的相对旋转角度;相对旋转角度用于确定佩戴式设备的位置。
6、本技术实施例一方面提供了一种位置确定装置,该装置包括:
7、第一位置获取模块,用于获取设备关联部位在待测时刻对的部位相对位置;
8、第二位置获取模块,用于获取佩戴式设备在待测时刻对的设备相对位置;设备关联部位是指佩戴该佩戴式设备的部位;
9、模型构建模块,用于基于设备关联部位的部位坐标系与佩戴式设备的设备坐标系之间的坐标系相对关系,构建设备关联部位与佩戴式设备之间的旋转标定模型;
10、角度确定模块,用于将部位相对位置及设备相对位置,关联至旋转标定模型,确定佩戴式设备与设备关联部位之间的相对旋转角度;相对旋转角度用于确定佩戴式设备的位置。
11、其中,待测时刻对包括第一时刻及第二时刻;该第一位置获取模块,包括:
12、位置获取单元,用于在标准坐标系下,获取设备关联部位在第一时刻的第一部位位置信息,获取设备关联部位在第二时刻的第二部位位置信息;
13、相对确定单元,用于根据第一部位位置信息及第二部位位置信息,确定设备关联部位由第一时刻至第二时刻所产生的部位相对位置。
14、其中,待测时刻对包括第一时刻及第二时刻;该第二位置获取模块,包括:
15、采样获取单元,用于获取佩戴式设备在第一时刻至第二时刻的时间段内所产生的设备参数,获取佩戴式设备的采样频率;
16、参数积分单元,用于基于采样频率,对第一时刻至第二时刻的时间段内所产生的设备参数进行积分处理,得到佩戴式设备在待测时刻对的设备相对位置。
17、其中,待测时刻对的数量为m,m为正整数;该装置还包括:
18、时刻筛选模块,用于根据m个待测时刻对分别对应的部位相对位置与设备相对位置,确定m个待测时刻对中的有效时刻对;
19、确定触发模块,用于针对有效时刻对所对应的部位相对位置及设备相对位置,执行将部位相对位置及设备相对位置,关联至旋转标定模型,确定佩戴式设备与设备关联部位之间的旋转角度的过程。
20、其中,该时刻筛选模块,包括:
21、第一转换单元,用于获取第s个待测时刻对所对应的部位相对位置的第一矩阵迹,对第一矩阵迹进行转换,确定设备关联部位在第s个待测时刻对所对应的第一旋转角度;s为小于或等于m的正整数;
22、第二转换单元,用于获取第s个待测时刻对所对应的设备相对位置的第二矩阵迹,对第二矩阵迹进行转换,确定佩戴式设备在第s个待测时刻对所对应的第二旋转角度;
23、无效确定单元,用于若第一旋转角度与第二旋转角度之间的角度差值,大于或等于第一角度阈值,则将第s个待测时刻对确定为无效时刻对;
24、有效确定单元,用于若第一旋转角度与第二旋转角度之间的角度差值,小于第一角度阈值,则将第s个待测时刻对确定为有效时刻对。
25、其中,该时刻筛选模块,包括:
26、时长获取单元,用于获取第s个待测时刻对的待测时长;
27、该第二转换单元,还用于获取第s个待测时刻对所对应的设备相对位置的第二矩阵迹,对第二矩阵迹进行转换,确定佩戴式设备在第s个待测时刻对所对应的第二旋转角度;s为小于或等于m的正整数;
28、该有效确定单元,还用于若待测时长小于或等于有效时长阈值,且第二旋转角度大于第二角度阈值,则将第s个待测时刻对确定为有效时刻对;
29、该无效确定单元,还用于若待测时长大于有效时长阈值,或第二旋转角度小于或等于第二角度阈值,则将第s个待测时刻对确定为无效时刻对。
30、其中,该模型构建模块,包括:
31、初始构建单元,用于获取设备关联部位与佩戴式设备之间的刚体变换参数,基于设备关联部位与佩戴式设备之间的刚体连接特性,构建初始标定模型;
32、参数处理单元,用于获取佩戴式设备相对于设备关联部位的初始旋转值,根据设备关联部位的部位坐标系与佩戴式设备的设备坐标系之间的坐标系相对关系,确定设备关联部位与佩戴式设备之间的旋转参数;
33、模型生成单元,用于将初始旋转值、旋转参数与初始标定模型进行融合,生成旋转标定模型。
34、其中,该角度确定模块,包括:
35、模型化简单元,用于基于左乘四元数信息与右乘四元数信息,对旋转标定模型进行化简,得到包括旋转参数的待解析模型;
36、角度确定单元,用于将部位相对位置及设备相对位置,关联至待解析模型,确定旋转参数的值,将旋转参数的值确定为佩戴式设备与设备关联部位之间的相对旋转角度。
37、其中,待测时刻对的数量为n;n为正整数;
38、该角度确定模块,包括:
39、系数确定单元,用于将n个待测时刻对的部位相对位置及设备相对位置,分别关联至旋转标定模型,确定n个待测时刻对分别对应的旋转参数系数;
40、参数组合单元,用于将n个旋转参数系数与旋转标定模型中的旋转参数,组成联合模型;
41、模型解析单元,用于对联合模型进行解析,得到旋转参数的值;
42、该角度确定单元,还用于将旋转参数的值确定为佩戴式设备与设备关联部位之间的相对旋转角度。
43、其中,该系数确定单元,包括:
44、系数获取子单元,用于将n个待测时刻对的部位相对位置及设备相对位置,分别关联至旋转标定模型,确定n个待测时刻对分别对应的初始参数系数;
45、角度转换子单元,用于若n大于或等于加权处理阈值,则对n个待测时刻对分别对应的设备相对位置进行角度转换,得到n个待测时刻对分别对应的第二旋转角度;
46、权重确定子单元,用于基于n个待测时刻对分别对应的第二旋转角度,确定n个待测时刻对分别对应的时刻权重;
47、系数转换子单元,用于将n个待测时刻对分别对应的时刻权重,对n个旋转参数系数进行加权处理,得到n个待测时刻对分别对应的旋转参数系数。
48、其中,该模型解析单元,包括:
49、参数简化子单元,用于获取佩戴式设备相对于设备关联部位的旋转方式,基于旋转方式对联合模型进行参数简化,得到包含旋转参数的有效参数数据;
50、数据分解子单元,用于对有效参数数据在n个旋转参数系数中对应的数据进行分解,得到旋转参数的值。
51、其中,该装置还包括:
52、位置确定模块,用于获取设备关联部位的部位位置,基于相对旋转角度对部位位置进行转换,得到佩戴式设备的设备位置;
53、设备渲染模块,用于基于设备位置,渲染佩戴式设备所对应的虚拟设备。
54、本技术实施例一方面提供了一种计算机设备,包括处理器、存储器、输入输出接口;
55、处理器分别与存储器和输入输出接口相连,其中,输入输出接口用于接收数据及输出数据,存储器用于存储计算机程序,处理器用于调用该计算机程序,以使包含该处理器的计算机设备执行本技术实施例一方面中的位置确定方法。
56、本技术实施例一方面提供了一种计算机可读存储介质,计算机可读存储介质存储有计算机程序,该计算机程序适于由处理器加载并执行,以使得具有该处理器的计算机设备执行本技术实施例一方面中的位置确定方法。
57、本技术实施例一方面提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存储介质中。计算机设备的处理器从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行本技术实施例一方面中的各种可选方式中提供的方法。换句话说,该计算机指令被处理器执行时实现本技术实施例一方面中的各种可选方式中提供的方法。
58、实施本技术实施例,将具有如下有益效果:
59、在本技术实施例中,获取设备关联部位在待测时刻对的部位相对位置,获取佩戴式设备在待测时刻对的设备相对位置;设备关联部位是指佩戴佩戴式设备的部位;基于设备关联部位的部位坐标系与佩戴式设备的设备坐标系之间的坐标系相对关系,构建设备关联部位与佩戴式设备之间的旋转标定模型;将部位相对位置及设备相对位置,关联至旋转标定模型,确定佩戴式设备与设备关联部位之间的相对旋转角度;相对旋转角度用于确定佩戴式设备的位置。通过以上过程,可以通过佩戴式设备与佩戴该佩戴式设备的设备关联部位之间的关系,借助于设备关联部位的位置,可以将佩戴式设备的位置渲染出来,也就是说,由于佩戴式设备是与设备关联部位是贴合的,而不同用户的设备关联部位的大小或粗细等各不相同,这也就导致了无法直接获取到佩戴式设备的位置,通过以上过程,实现了对佩戴式设备的位置确定,而且是基于佩戴式设备与设备关联部位之间的关系进行确定的,无需考虑不同用户的设备关联部位的不同,从而提高位置确定的准确性及效率。
- 还没有人留言评论。精彩留言会获得点赞!