超视距工程设备远程控制台的制作方法-k8凯发
1.本实用新型涉及车辆远程控制领域,尤其是涉及超视距工程设备远程控制台。
背景技术:
2.现有包括叉车和挖机等类型的工程车辆一般通过人工操控进行使用,但是某些工作环境存在风险,人工作业危险性较大。
第五代移动通信技术是最新一代蜂窝移动通信技术,也是继系统之后的延伸。5g的性能特点是高数据传输速率、减少延迟、节省能源、降低成本、提高系统容量和大规模设备连接。
3.在实现本实用新型过程中,发明人发现该技术中至少存在如下问题,在空旷场地如野外矿山上,为减少工人在施工现场操控工程车辆,保护工人人身安全,结合
5g技术远程操控工程车辆成为技术发展的必然,因此,现在提出超视距工程设备远程控制台。
技术实现要素:
4.为了改善在空旷场地如野外矿山上,工人在施工现场操控工程车辆,容易对人身安全构成一定威胁的问题,本实用新型提供超视距工程设备远程控制台。
5.本实用新型提供超视距工程设备远程控制台,采用如下的技术方案:
6.超视距工程设备远程控制台,包括远程驾驶舱和设置在远程驾驶舱内部的控制设备,所述控制设备包括座椅、操纵杆、显示屏和进退踏板,所述控制设备通讯连接有
5g通讯模块;
7.所述
5g通讯模块通讯连接有用于控制挖掘机的挖掘机操控机构;挖掘机本体上设置有监控摄像头,所述监控摄像头与
5g通讯模块通讯连接。
8.通过采用上述技术方案,在使用时,工作人员可在远程驾驶舱内部对操纵杆和进退踏板进行操作,通过
5g通讯模块向挖掘机操控机构发送控制信号,以操控挖掘机的转向、换挡、挖掘运动和行驶,监控摄像头能将采集的挖掘机周围的画面通过
5g通讯模块传输至显示屏上显示,供工作人员观看。
9.可选的,所述远程驾驶舱的一侧通过合页转动连接有舱门。
10.通过采用上述技术方案,舱门可方便工作人员进出远程驾驶舱。
11.可选的,所述远程驾驶舱的内底壁固定安装有升降箱,所述升降箱的内部转动连接有螺纹杆,所述螺纹杆上连接有驱动机构,所述螺纹杆的外表面螺纹连接有升降板,所述升降板的内部滑动连接有滑动杆,所述滑动杆的两端与升降箱相连接,所述升降板的顶部固定安装有安装板,所述安装板贯穿至升降箱外部并与显示屏固定连接。
12.通过采用上述技术方案,在面对不同身高的工作人员需要对显示屏进行高度调整时,工作人员只需通过驱动机构控制升降板移动,升降板可带动安装板和显示屏移动,从而对显示屏的高度进行调整。
13.可选的,所述远程驾驶舱的底部转动安装有万向轮。
14.通过采用上述技术方案,万向轮可方便工作人员移动远程驾驶舱,以满足不同地
方的使用需求。
15.可选的,所述舱门的内部开设有通槽,所述舱门内部所开设通槽的内壁安装有推拉窗。
16.通过采用上述技术方案,远程驾驶舱内的热量可通过推拉窗传递到外部。
17.可选的,所述驱动机构包括电机,所述电机与升降箱固定连接,所述电机的输出端固定安装有第一锥齿轮,所述第一锥齿轮啮合连接有第二锥齿轮,所述第二锥齿轮与螺纹杆固定连接。
18.通过采用上述技术方案,电机可带动第一锥齿轮转动,第一锥齿轮可带动第二锥齿轮转动,第二锥齿轮可带动螺纹杆转动。
19.可选的,所述远程驾驶舱的相对两侧均固定安装有支撑块,所述支撑块的内部固定安装有电动伸缩杆,所述电动伸缩杆竖直向下的伸缩端固定安装有支撑板。
20.通过采用上述技术方案,在使用时,工作人员可通过电动伸缩杆控制支撑板移动,使支撑板与地面接触,从而使远程驾驶舱在使用时更加稳固。
21.可选的,所述升降板的相对两侧均固定安装有滑块,所述升降箱的内部开设有与所述滑块相适配的滑槽。
22.通过采用上述技术方案,滑块和滑槽可限制升降板的移动范围,同时可使升降板移动得更加平稳。
23.综上所述,本实用新型具有以下有益效果:
24.1.本实用新型在使用时,工作人员可在远程驾驶舱内部对操纵杆和进退踏板进行操作,通过
5g通讯模块向挖掘机操控机构发送控制信号,以操控挖掘机的转向、换挡、挖掘运动和行驶,监控摄像头能将采集的挖掘机周围的画面通过
5g通讯模块传输至显示屏上显示,供工作人员观看,从而提高了工作人员的人身安全;
25.2.本实用新型在面对不同身高的工作人员需要对显示屏进行高度调整时,工作人员只需通过驱动机构控制升降板移动,升降板可带动安装板和显示屏移动,从而对显示屏的高度进行调整。
附图说明
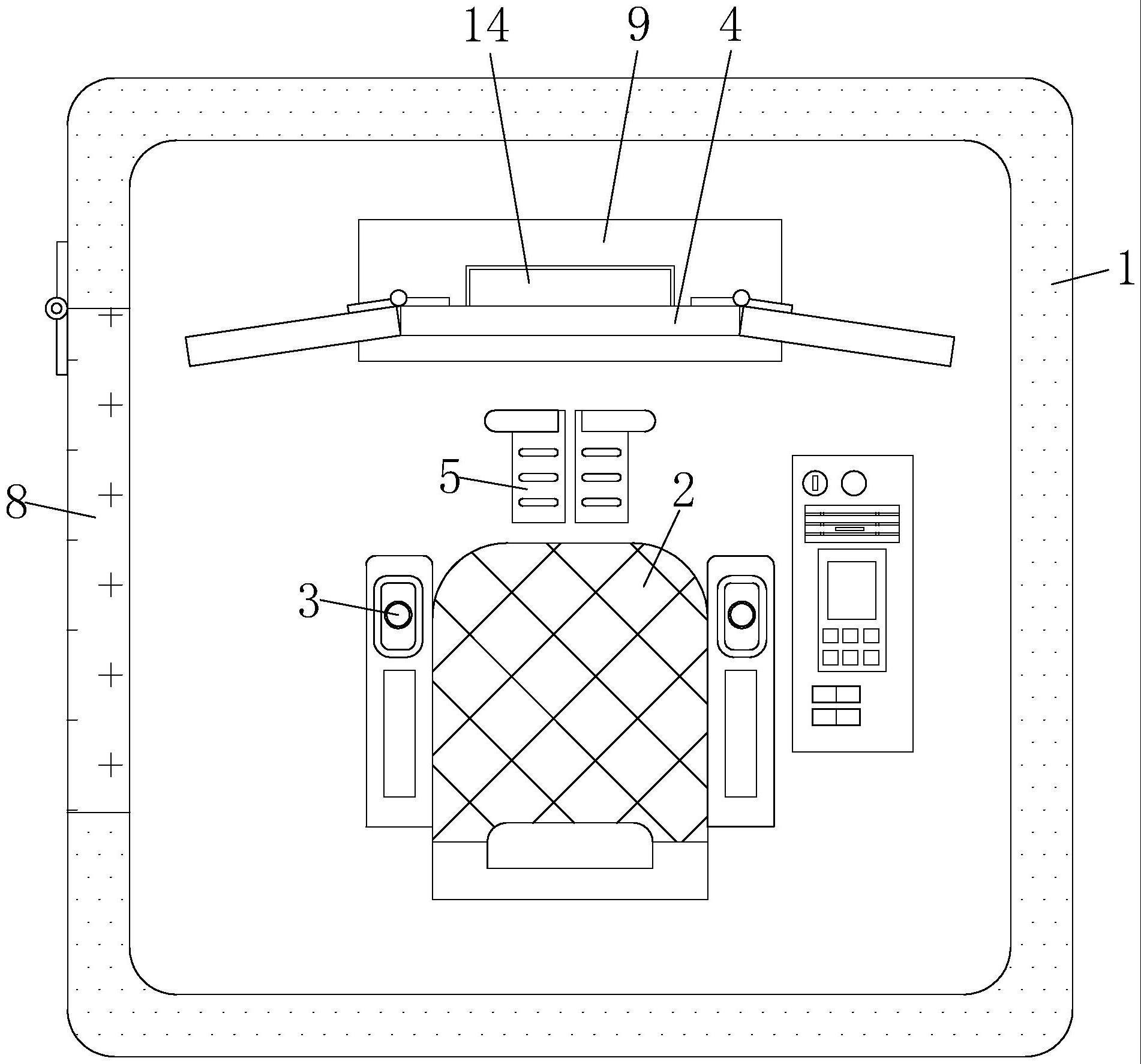
26.图1是本实用新型俯视剖面结构示意图。
27.图2是本实用新型正视剖面结构示意图。
28.图3是本实用新型远程控制原理示意图。
29.图4是本实用新型升降箱结构示意图。
30.附图标记说明:
31.1、远程驾驶舱;
2、座椅;
3、操纵杆;
4、显示屏;
5、进退踏板;
6、5g通讯模块;
7、挖掘机操控机构;
8、舱门;
9、升降箱;
10、螺纹杆;
11、驱动机构;
111、电机;
112、第一锥齿轮;
113、第二锥齿轮;
12、升降板;
13、滑动杆;
14、安装板;
15、万向轮;
16、推拉窗;
17、支撑块;
18、电动伸缩杆;
19、支撑板;
20、滑块。
具体实施方式
32.以下结合附图
1-4对本技术作进一步详细说明。
33.请参照图1和图2,超视距工程设备远程控制台,包括远程驾驶舱1和设置在远程驾驶舱1内部的控制设备。
远程驾驶舱1的一侧通过合页转动连接有舱门8,舱门8可方便工作人员进出远程驾驶舱
1。
舱门8的内部开设有通槽,舱门8内部所开设通槽的内壁安装有推拉窗
16,远程驾驶舱1内的热量可通过推拉窗
16传递到外部。
34.其中,远程驾驶舱1的底部转动安装有万向轮
15,万向轮
15可方便工作人员移动远程驾驶舱1,以满足不同地方的使用需求。
远程驾驶舱1的相对两侧均固定安装有支撑块
17,支撑块
17的内部固定安装有电动伸缩杆
18,电动伸缩杆
18竖直向下的伸缩端固定安装有支撑板
19,在使用时,工作人员可通过电动伸缩杆
18控制支撑板
19移动,使支撑板
19与地面接触,从而使远程驾驶舱1在使用时更加稳固。
35.请参照图1和图3,控制设备包括座椅
2、操纵杆
3、显示屏4和进退踏板5,控制设备通讯连接有
5g通讯模块6,
5g通讯模块6通讯连接有用于控制挖掘机动作的挖掘机操控机构7,挖掘机操控机构7位于挖掘机本体上,且为现有技术。
挖掘机本体上设置有监控摄像头,监控摄像头与
5g通讯模块6通讯连接。
36.请参照图1和图4,远程驾驶舱1的内底壁固定安装有升降箱9,升降箱9的内部转动连接有螺纹杆
10,螺纹杆
10上连接有驱动机构
11。
驱动机构
11包括电机
111,电机
111与升降箱9固定连接,电机
111的输出端固定安装有第一锥齿轮
112,第一锥齿轮
112啮合连接有第二锥齿轮
113,第二锥齿轮
113与螺纹杆
10固定连接。
37.请参照图1和图4,螺纹杆
10的外表面螺纹连接有升降板
12,升降板
12的内部滑动连接有滑动杆
13,滑动杆
13的两端与升降箱9相连接,升降板
12的顶部固定安装有安装板
14,安装板
14贯穿至升降箱9外部并与显示屏4固定连接。
升降板
12的相对两侧均固定安装有滑块
20,升降箱9的内部开设有与滑块
20
相适配的滑槽,滑块
20
和滑槽可限制升降板
12的移动范围,同时可使升降板
12移动得更加平稳。
38.本实用新型的实施原理为:在使用时,工作人员可在远程驾驶舱1内部对操纵杆3和进退踏板5进行操作,通过
5g通讯模块6向挖掘机操控机构7发送控制信号,以操控挖掘机的转向、换挡、挖掘运动和行驶,监控摄像头能将采集的挖掘机周围的画面通过
5g通讯模块6传输至显示屏4上显示,供工作人员观看;
39.在面对不同身高的工作人员需要对显示屏4进行高度调整时,工作人员可启动电机
111,电机
111可带动第一锥齿轮
112转动,第一锥齿轮
112可带动第二锥齿轮
113转动,第二锥齿轮
113可带动螺纹杆
10转动,螺纹杆
10可在滑动杆
13的配合下带动升降板
12移动,升降板
12可带动安装板
14和显示屏4移动,从而对显示屏4的高度进行调整。
40.以上均为本实用新型的较佳实施例,并非依此限制本实用新型的保护范围,故:凡依本实用新型的结构、形状、原理所做的等效变化,均应涵盖于本实用新型的保护范围之内。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!