冷却管成型装置的制作方法-k8凯发
1.本实用新型涉及冷却管技术领域,具体地,涉及一种冷却管成型装置,尤其是一种非球面半导体腔体冷却管成型装置。
背景技术:
2.目前冷却管成型方式是设计一个与腔体外形一致的模具,按照模具将铜管手动弯成需要的形状,在实际操作过程中,弯曲半径不标准,间距不能控制,给后续安装造成非常大的困境。
技术实现要素:
3.针对现有技术中的缺陷,本实用新型的目的是提供一种冷却管成型装置。
4.根据本实用新型提供的一种冷却管成型装置,包括:传送组件、导向块、第一导正组件以及第二导正组件;
5.所述传送组件设置在所述导向块的一侧,所述第一导正组件、所述第二导正组件以及所述偏移块设置在所述导向块的另一侧;所述传送组件用于沿第一方向输送管体,所述导向块用于沿所述第一方向限位导向所述管体;
6.所述管体成型过程中,所述第一导正组件的导正端的导正位置点和所述第二导正组件的导正端的导正位置点位于同一圆周上。
7.优选的,所述第一导正组件包括第一直线伺服单元和第一导正块;
8.所述第一导正块设置在所述第一直线伺服单元上,所述第一直线伺服单元带动所述第一导正块移动;
9.所述第二导正组件包括第二直线伺服单元和第二导正块;
10.所述第二导正块设置在所述第二直线伺服单元上,所述第二直线伺服单元带动所述第二导正块移动;
11.所述管体成型过程中,所述第一导正块的导正端的导正位置点和所述第二导正块的导正端的导正位置点始终位于同一圆周上。
12.优选的,所述第一导正块的导正方向与所述第一方向的夹角为
135度;
13.所述第二导正块的导正方向与所述第一方向的夹角为
45度;
14.所述第一导正块的导正方向与所述第二导正块的导正方向的夹角为
90
度。
15.优选的,所述第一直线伺服单元的中心线与所述第一方向的夹角为
22.36度;
16.所述第二直线伺服单元的中心线与所述第一方向的夹角为
67.64度。
17.优选的,所述第一导正块的导正端面和所述第二导正块的导正端面均设置有凹槽,所述凹槽用于限位所述管体。
18.优选的,所述第一导正块的导正端面和所述第二导正块的导正端面均为半圆形。
19.优选的,还包括偏移块,所述偏移块设置在所述导向块的另一侧;
20.所述偏移块的偏移位置点、所述第一导正组件的导正端的导正位置点以及所述第
二导正组件的导正端的导正位置点位于同一圆周上;
21.所述偏移块用于使所述管体产生与圆垂直方向的偏移。
22.优选的,所述偏移块的偏移面为曲面或平面。
23.优选的,所述偏移块的中心线与所述第一方向的夹角为
112.36度。
24.优选的,所述传送组件包括主动轮和从动轮;
25.所述主动轮和所述从动轮相对设置,所述主动轮和所述从动轮用于传送管体,传送时,所述管体位于所述主动轮和所述从动轮之间;
26.所述导向块水平设置,所述第一方向为水平方向;
27.所述导向块上设置有导向孔,所述导向孔的中心线与所述主动轮和所述从动轮之间的中心线重合。
28.与现有技术相比,本实用新型具有如下的有益效果:
29.1、本实用新型通过两个导正块使管体弯曲成圆,通过伺服直线单元带动导正块移动,进而改变成圆的直径,通过偏移块形成各个圆之间的间距,进而完成冷却管的成型;
30.2、本实用新型的偏移块为平面或曲面,当为平面时,可以使冷却管中的圆之间形成相等的间距,当为曲面时,可以使冷却管中的圆之间形成不相等的间距,进而大大提高了实用性。
附图说明
31.通过阅读参照以下附图对非限制性实施例所作的详细描述,本实用新型的其它特征、目的和优点将会变得更明显:
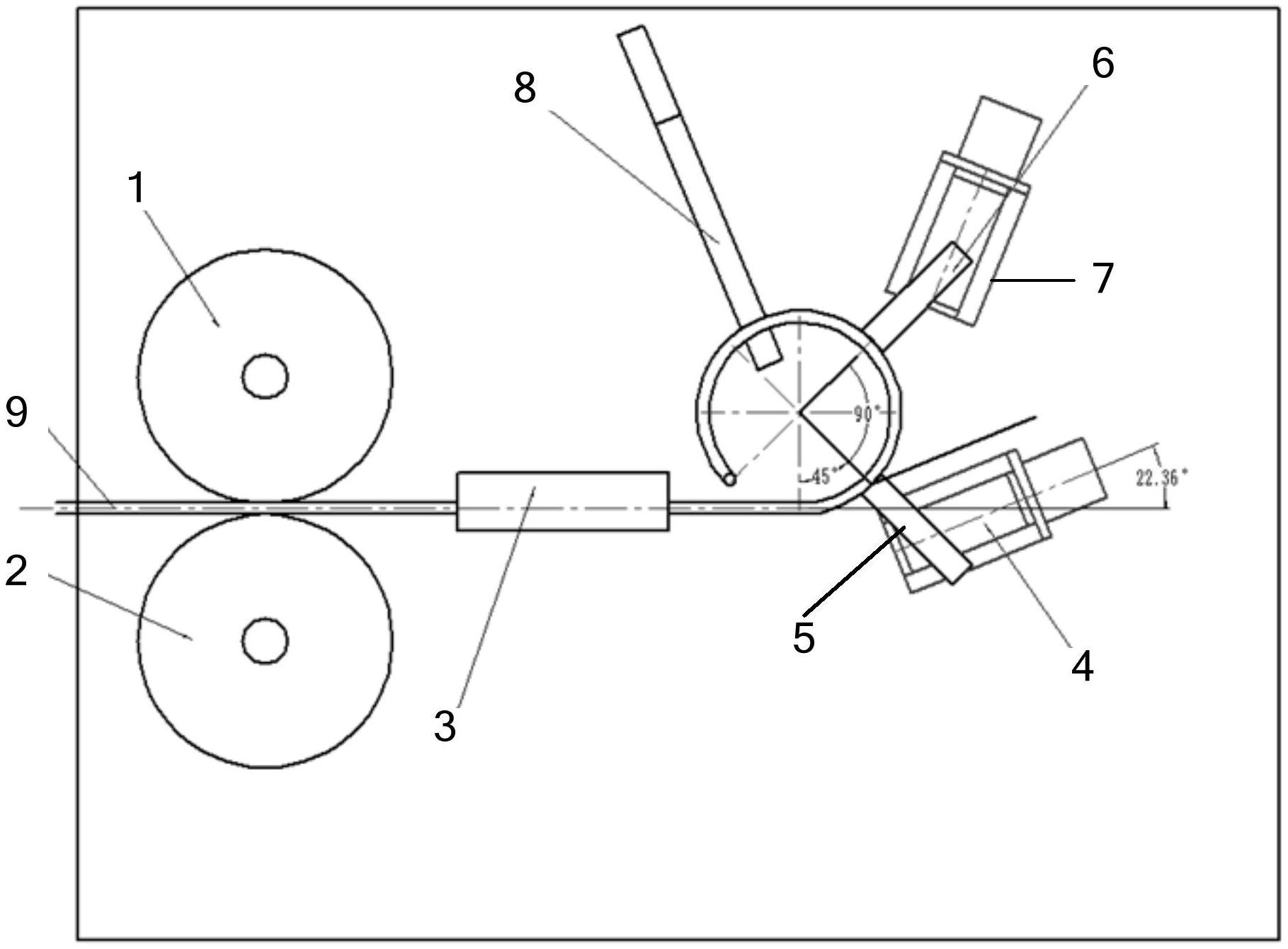
32.图1为本实用新型的冷却管成型装置的整体结构示意图;
33.图2为本实用新型的冷却管成型装置的成型示意图;
34.图3为偏移块的结构示意图;
35.图4为冷却管成型装置的设计原理图;
36.图5为冷却管的结构示意图;
37.图6为冷却管应用到陶瓷腔体上的结构示意图。
38.图中示出:
39.主动轮1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏移块840.从动轮2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
偏移面
80141.导向块3ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
管体942.第一直线伺服单元4ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
冷却管
1043.第一导正块5ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
胶体
1144.第二直线伺服单元6ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
陶瓷腔体
1245.第二导正块7具体实施方式
46.下面结合具体实施例对本实用新型进行详细说明。
以下实施例将有助于本领域的技术人员进一步理解本实用新型,但不以任何形式限制本实用新型。
应当指出的是,对本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变化和改进。
这些都属于本实用新型的保护范围。
47.实施例1:
48.如图1~6所示,本实施例提供一种冷却管成型装置,包括:传送组件、导向块
3、第一导正组件以及第二导正组件,传送组件设置在导向块3的一侧,第一导正组件、第二导正组件以及偏移块8设置在导向块3的另一侧;传送组件用于沿第一方向输送管体9,导向块3用于沿第一方向限位导向管体9,管体9成型过程中,第一导正组件的导正端的导正位置点和第二导正组件的导正端的导正位置点位于同一圆周上。
49.本实施例的冷却管成型装置还包括偏移块8,偏移块8设置在导向块3的另一侧,偏移块8的偏移位置点、第一导正组件的导正端的导正位置点以及第二导正组件的导正端的导正位置点位于同一圆周上,偏移块8用于使管体9产生与圆垂直方向的偏移。
偏移块8的偏移面为曲面或平面。
偏移块的中心线与第一方向的夹角为
112.36度。
50.第一导正组件包括第一直线伺服单元4和第一导正块5,第一导正块5设置在第一直线伺服单元4上,第一直线伺服单元4带动第一导正块5移动,第二导正组件包括第二直线伺服单元6和第二导正块
7。
第二导正块7设置在第二直线伺服单元6上,第二直线伺服单元6带动第二导正块7移动,管体9成型过程中,第一导正块5的导正端的导正位置点和第二导正块7的导正端的导正位置点始终位于同一圆周上。
51.第一直线伺服单元4和第二直线伺服单元6可理解为一个整体马达,包括伺服电机、伺服放大器、直线导轨、滚珠丝杆等组成,能实现一维或二维的直线运动,运动位置点(距离或称为位移)及运动速度可控,一般分辨率可达
0.001mm,通过设置伺服放大器程序(位移与速度),控制伺服电机的运转带动滚珠丝杆运动,实现直线运动,本例中是沿着与水平夹角方向运动,第一导正块
5、第二导正块7是分别固定在第一直线伺服单元
4、第二直线伺服单元6上,与之一起运动。
52.第一导正块5的导正端面和第二导正块7的导正端面均设置有凹槽,凹槽用于限位管体
9。
第一导正块5的导正端面和第二导正块7的导正端面均为半圆形。
53.第一导正块5的导正方向与第一方向的夹角为
135度,第二导正块7的导正方向与第一方向的夹角为
45度,第一导正块5的导正方向与第二导正块7的导正方向的夹角为
90
度。
第一直线伺服单元4的中心线与第一方向的夹角为
22.36度,第二直线伺服单元6的中心线与第一方向的夹角为
67.64度。
54.传送组件包括主动轮1和从动轮2,主动轮1和从动轮2相对设置,主动轮1和从动轮2用于传送管体9,传送时,管体9位于主动轮1和从动轮2之间,导向块3水平设置,第一方向为水平方向,导向块3上设置有导向孔,导向孔的中心线与主动轮1和从动轮2之间的中心线重合。
55.工作原理:冷却管成型原理为反作用力的结果,主动轮1和从动轮2将铜管送向前方,在前进的位置上遇到第一导正块5阻挡而不能前进,产生阻力,改变铜管的运动方向,铜管由直线变成圆弧形状,遇到第二导正块7时又将改变方向,继续折弯成圆弧形状,根据三点成圆原理(三点即导向块出管位置点、第一导正块5的导正位置点、第二导正块7的导正位置点),就形成一个圆形管;偏移块8的作用是将绕成的圆产生垂直方向上的偏移,即形成圆环间距,整个过程可以理解为弹性成型。
56.实施例2:
57.本领域技术人员可以将本实施例理解为实施例1的更为具体的说明。
58.本实施例提供一种冷却管成型装置,包括主动轮
1、从动轮
2、导向块
3、第一直线伺服单元
4、第一导正块
5、第二直线伺服单元
6、第二导正块
7、偏移块
8、管体
9。
59.管体9为钢管,铜管通过主动轮1与从动轮2的作用按一定速度输入,通过导向块3,在第一导正块5和第二导正块7的作用下弯曲成圆,第一导正块5安装在第一伺服直线单元4上,在第一伺服直线单元4的带动下运动,第二导正块7安装在第二伺服直线单元6上,在第二伺服直线单元6的带动下运动,使圆的直径变化,通过偏移块8时,使得铜管产生直径方向的偏移,偏移的距离为铜管间距。
60.导向块3水平放置,其内孔中心线与主动轮1和从动轮2之间的中心线重合,其内孔直径为铜管直径
0.2mm。
61.第一直线伺服单元4和第二伺服直线单元7,两者成
45°
夹角安装,其中,第一伺服单元4为与水平成
22.36°
安装,其上第一导正块5为水平方向倾斜
135°,第一导正块5的端面设置为半圆形,其直径为
480mm,端面开一凹槽,直径为铜管直径
0.1-0.2mm,深度为铜管半径
1mm。
第二直线伺服单元6安装在第一直线伺服单元4上方,倾斜
67.64°,其上第二导正块7与水平方向成
45°
安装。
62.偏移块8与水平成
112.36°
设置,偏移块8根据圆环间距设置成曲线形状,若间距相等则偏移块表面为一平面;由于三点折弯成圆弧状,在经过偏移块8时,圆弧形成向一方偏移,偏移一直持续就形成圆环之间的间隙。
63.计算方法:
64.原理:两点及半径确定一个圆
65.由t1=2πr1/v,得出第1圈绕成需要时间t1,
66.t2=2πr2/v,得出第2圈绕成需要时间t2,
67.l1=r2-r1,由勾股定理得到:
68.求得
l2值,
69.l4=r2-l2-r1,已知
l2和
l4,根据勾股定理可计算得到
l3,
70.l3=cot22.36°
*l2,求得
l3值,
71.第一直线伺服单元4移动速度v1=
l3/t2,求得v1值,即第1圈到第2圈之间移动的位移及速度。
72.其中,铜管进给速度v,第一圈半径r1,第2圈半径r2,第1圈到第2圈之间中心移动位置
l1,伺服单元移动距离
l3,第1圈绕成时间t1,第2圈绕成时间t2,第1圈到第2圈之间伺服移动速度v1,同理可以计算出第二直线伺服单元6的行程与速度,第二直线伺服单元依次设定冷却管每段行程与速度即可。
73.本实施例按照每圈的实际长度,间距以及铜管输入的速度,计算出直线伺服单元移动的速度,进而来实现铜管制成螺旋状不等距非球面的管道。
对主动轮、从动轮以及直线伺服单元的控制,基于现有的软件即可实现。
74.本实用新型通过两个导正块使管体弯曲成圆,通过伺服直线单元带动导正块移动,进而改变成圆的直径,通过偏移块形成各个圆之间的间距,进而完成冷却管的成型。
75.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖
直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
76.以上对本实用新型的具体实施例进行了描述。
需要理解的是,本实用新型并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本实用新型的实质内容。
在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
当前第1页1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!