一种脑控下肢康复机器人的制作方法-k8凯发
本发明涉及医疗康复设备,具体涉及一种脑控下肢康复机器人。
背景技术:
1、脑血管病、脑外伤、脑神经外科手术损伤的患者中,有相当一部人遗留有下肢活动不利的后遗症,尤其是脑血管病,也称脑卒中,其后遗症状大多具有典型的痉挛模式。
2、目前市面上有许多康复理疗仪器,多用于神经、肌肉刺激,对于患者的步态纠正,主要依靠康复技师的指导。鉴于康复技师人数有限,而患者在康复技师指导下进行步态训练的时间较少,且康复技师的指导以患肢功能改善为主,忽视健侧姿态和全身功能协调,最终形成不正确的步态,影响康复效率。
3、因此有必要提供一种根据患者思想辅助患者运动、并引导患者形成正确的步态的脑控下肢康复机器人。
技术实现思路
1、本发明主要目的在于提供一种脑控下肢康复机器人,以解决现有技术存在的问题。
2、为解决上述技术问题,本发明采取了如下技术方案:
3、一种脑控下肢康复机器人,包括:
4、脑电帽,所述脑电帽用于接收、处理脑电信号;
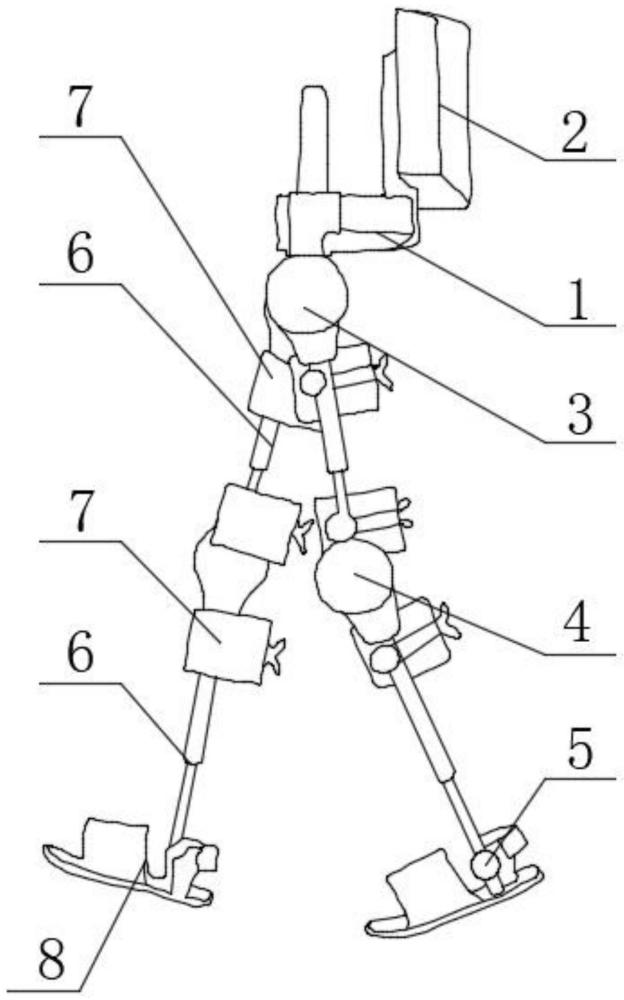
5、下肢机器人,所述下肢机器人包括腰部支撑结构,所述腰部支撑结构上侧设置有电池仓,所述电池仓用于为下肢机器人供电,所述腰部支撑结构下端连接有底部驱动机构,所述底部驱动机构包括髋部旋转结构、膝部旋转结构、踝部旋转结构和伸缩结构,所述髋部旋转结构连接于所述腰部支撑结构下端,所述膝部旋转结构通过伸缩结构连接于所述髋部旋转结构下端,所述踝部旋转结构通过伸缩结构连接于所述膝部旋转结构下端,所述脑电帽与所述下肢机器人通过无线信号连接。
6、进一步的,所述脑电帽包括弹性主体、干电极检测结构、信号处理模块和蓄电池,所述干电极检测结构、所述信号处理模块和所述蓄电池均连接于所述弹性主体上,所述蓄电池分别与所述干电极检测结构、所述信号处理模块电连接,所述干电极检测结构与所述信号处理模块电连接。
7、进一步的,所述髋部旋转结构包括髋关节转动架、髋关节伺服电机、髋关节谐波减速器和髋关节轴,所述髋关节转动架固定连接于所述腰部支撑结构下端,所述髋关节伺服电机和所述髋关节谐波减速器均安装于所述髋关节转动架内,所述髋关节谐波减速器与所述髋关节伺服电机的动力输出端相连接,所述髋关节谐波减速器的输出端连接有髋关节轴,所述髋关节轴通过第一伸缩结构与所述膝部旋转结构相连接,所述第一伸缩结构上设置有弹性收紧带。
8、进一步的,所述膝部旋转结构包括膝关节转动架、膝关节伺服电机、膝关节谐波减速器和膝关节轴,所述膝关节转动架连接于所述第一伸缩结构一端,所述膝关节伺服电机和所述膝关节谐波减速器均安装于所述膝关节转动架内,所述膝关节谐波减速器与所述膝关节伺服电机的动力输出端相连接,所述膝关节谐波减速器的输出端连接有膝关节轴,所述膝关节轴通过第二伸缩结构与所述踝部旋转结构相连接,所述第二伸缩结构上设置有弹性收紧带。
9、进一步的,所述踝部旋转结构包括踝关节转动架、踝关节伺服电机、踝关节谐波减速器和踝关节轴,所述踝关节转动架连接于所述第二伸缩结构一端,所述踝关节伺服电机和所述踝关节谐波减速器均安装于所述踝关节转动架内,所述踝关节谐波减速器与所述踝关节伺服电机的动力输出端相连接,所述踝关节谐波减速器的输出端连接有踝关节轴,所述踝关节轴通过连接柱与足托相连接。
10、进一步的,所述足托包括托底、脚背绑带和脚跟绑带,所述脚背绑带和所述脚跟绑带均连接于所述托底上,所述连接柱远离所述踝关节轴的一端与所述托底固定连接。
11、进一步的,所述腰部支撑结构上设置有固定腰带。
12、进一步的,所述伸缩结构包括外套管、内套管和弹性卡接结构,所述弹性卡接结构设置于所述内套管一端,所述外套管上设置有若干个卡接孔,所述内套管通过弹性卡接结构与一个所述卡接孔相卡接。
13、进一步的,所述弹性卡接结构包括滑框、弹簧和卡接头,所述滑框安装于所述内套管一端内部,所述弹簧安装于所述滑框内部,所述弹簧一端与所述卡接头底端相连接,所述卡接头与所述滑框滑动连接,所述卡接头远离所述弹簧的一端延伸至所述内套管外侧。
14、进一步的,所述卡接头包括连接座和卡接部,所述连接座一端与所述弹簧相连接,另一端与所述卡接部相连接,且所述连接座与所述滑框滑动连接,所述卡接孔的内壁为锥形腔体,所述连接座上设置有与所述锥形腔体相适配的锥形凸起,所述锥形凸起连接于所述锥形腔体内部。
15、与现有技术相比,本发明具有以下有益效果:
16、本发明公开的一种脑控下肢康复机器人通过脑电帽收集人脑信号,根据患者本人的想法,如起立、行走、活动等想法,引导患者做动作,使患者下肢动作跟随机器人设置的方向、角度,保持正确的坐立姿势,进而形成正确的步态,提高患者的康复效率。
技术特征:
1.一种脑控下肢康复机器人,其特征在于,包括:
2.如权利要求1所述的一种脑控下肢康复机器人,其特征在于,所述脑电帽包括弹性主体、干电极检测结构、信号处理模块和蓄电池,所述干电极检测结构、所述信号处理模块和所述蓄电池均连接于所述弹性主体上,所述蓄电池分别与所述干电极检测结构、所述信号处理模块电连接,所述干电极检测结构与所述信号处理模块电连接。
3.如权利要求2所述的一种脑控下肢康复机器人,其特征在于,所述髋部旋转结构包括髋关节转动架、髋关节伺服电机、髋关节谐波减速器和髋关节轴,所述髋关节转动架固定连接于所述腰部支撑结构下端,所述髋关节伺服电机和所述髋关节谐波减速器均安装于所述髋关节转动架内,所述髋关节谐波减速器与所述髋关节伺服电机的动力输出端相连接,所述髋关节谐波减速器的输出端连接有髋关节轴,所述髋关节轴通过第一伸缩结构与所述膝部旋转结构相连接,所述第一伸缩结构上设置有弹性收紧带。
4.如权利要求3所述的一种脑控下肢康复机器人,其特征在于,所述膝部旋转结构包括膝关节转动架、膝关节伺服电机、膝关节谐波减速器和膝关节轴,所述膝关节转动架连接于所述第一伸缩结构一端,所述膝关节伺服电机和所述膝关节谐波减速器均安装于所述膝关节转动架内,所述膝关节谐波减速器与所述膝关节伺服电机的动力输出端相连接,所述膝关节谐波减速器的输出端连接有膝关节轴,所述膝关节轴通过第二伸缩结构与所述踝部旋转结构相连接,所述第二伸缩结构上设置有弹性收紧带。
5.如权利要求4所述的一种脑控下肢康复机器人,其特征在于,所述踝部旋转结构包括踝关节转动架、踝关节伺服电机、踝关节谐波减速器和踝关节轴,所述踝关节转动架连接于所述第二伸缩结构一端,所述踝关节伺服电机和所述踝关节谐波减速器均安装于所述踝关节转动架内,所述踝关节谐波减速器与所述踝关节伺服电机的动力输出端相连接,所述踝关节谐波减速器的输出端连接有踝关节轴,所述踝关节轴通过连接柱与足托相连接。
6.如权利要求5所述的一种脑控下肢康复机器人,其特征在于,所述足托包括托底、脚背绑带和脚跟绑带,所述脚背绑带和所述脚跟绑带均连接于所述托底上,所述连接柱远离所述踝关节轴的一端与所述托底固定连接。
7.如权利要求1所述的一种脑控下肢康复机器人,其特征在于,所述腰部支撑结构上设置有固定腰带。
8.如权利要求1所述的一种脑控下肢康复机器人,其特征在于,所述伸缩结构包括外套管、内套管和弹性卡接结构,所述弹性卡接结构设置于所述内套管一端,所述外套管上设置有若干个卡接孔,所述内套管通过弹性卡接结构与一个所述卡接孔相卡接。
9.如权利要求8所述的一种脑控下肢康复机器人,其特征在于,所述弹性卡接结构包括滑框、弹簧和卡接头,所述滑框安装于所述内套管一端内部,所述弹簧安装于所述滑框内部,所述弹簧一端与所述卡接头底端相连接,所述卡接头与所述滑框滑动连接,所述卡接头远离所述弹簧的一端延伸至所述内套管外侧。
10.如权利要求9所述的一种脑控下肢康复机器人,其特征在于,所述卡接头包括连接座和卡接部,所述连接座一端与所述弹簧相连接,另一端与所述卡接部相连接,且所述连接座与所述滑框滑动连接,所述卡接孔的内壁为锥形腔体,所述连接座上设置有与所述锥形腔体相适配的锥形凸起,所述锥形凸起连接于所述锥形腔体内部。
技术总结
本发明公开了一种脑控下肢康复机器人,涉及医疗康复设备技术领域。包括脑电帽,脑电帽用于接收、处理脑电信号;下肢机器人,包括腰部支撑结构和电池仓,电池仓用于为下肢机器人供电,腰部支撑结构连接有底部驱动机构,底部驱动机构包括髋部旋转结构、膝部旋转结构、踝部旋转结构和伸缩结构,髋部旋转结构连接于腰部支撑结构下端,膝部旋转结构连接于髋部旋转结构下端,踝部旋转结构连接于膝部旋转结构下端,脑电帽与下肢机器人通过无线信号连接。本发明通过人脑发出指令,使下肢机器人带动患肢按正常步态抬腿、屈曲、摆动小腿、足跟着地的动作,辅助患者行走,使患者养成正确迈步姿势,促进神经重建,形成正确的肌肉记忆。
技术研发人员:张琪,曹于,张丽,黄奇,潘颖,黄宇轩,张晗
受保护的技术使用者:张琪
技术研发日:
技术公布日:2024/2/8
- 还没有人留言评论。精彩留言会获得点赞!